
Michigan Scientific Corporation Hjulpulsomformer (WPT) er et kompakt kodesystem som er designet for å festes til hjulet på et kjøretøy. Kodersignaler fra WPT kan brukes til å beregne rotasjonshastighet, vinkelposisjonen og rotasjonsretningen til et hjul. Disse målingene brukes ofte til å spore posisjonen til et kjøretøy for applikasjoner som utvikling av elektriske kjøretøy og sporing av autonome kjøretøy.
Autonom kjøretøysporing
Autonome kjøretøyer er avhengige av Global Navigation Satellite System (GNSS) teknologi for å spore posisjonen deres, men disse systemene kan svikte i urbane, innendørs eller underjordiske miljøer. I områder der GNSS-sporing ikke er tilgjengelig, må andre teknologier som hjulpulstransdusere eller akselerometre brukes for å spore kjøretøyets plassering. WPT-systemer kan brukes til å spore posisjonen til autonome gaffeltrucker inne i varehus, eller autonomt underjordisk gruveutstyr. I tillegg kan WPT-systemet brukes til å teste og validere nøyaktigheten til akselerometerbaserte systemer.
WPT-sensorbeskrivelse
Sammenstillingen er designet for å monteres raskt og enkelt på et kjøretøyhjul. Dens kompakte og lette design består av elektronikk i et robust hus. WPT er montert på hjulet via Hurtigkobling av låsemutterhylser eller Extended Lug Nuts. Adapterplatene og Quick Connect Lug Mutter Collets kommer i en rekke størrelser og konfigurasjoner for å møte alle standard hjuldimensjoner. EN Magnetisk kjøretøystatorsikring og sikringsstang brukes til å holde kodermodulstatoren på plass mens sensoren brukes på kjøretøyet. På grunn av kjøretøytestingens natur er WPT designet for å være svært robust. Med roterende tetninger for en IP67-klassifisering er WPT ideell for testing i regntunge, snørike eller skitne omgivelser.
monteres raskt og enkelt på et kjøretøyhjul. Dens kompakte og lette design består av elektronikk i et robust hus. WPT er montert på hjulet via Hurtigkobling av låsemutterhylser eller Extended Lug Nuts. Adapterplatene og Quick Connect Lug Mutter Collets kommer i en rekke størrelser og konfigurasjoner for å møte alle standard hjuldimensjoner. EN Magnetisk kjøretøystatorsikring og sikringsstang brukes til å holde kodermodulstatoren på plass mens sensoren brukes på kjøretøyet. På grunn av kjøretøytestingens natur er WPT designet for å være svært robust. Med roterende tetninger for en IP67-klassifisering er WPT ideell for testing i regntunge, snørike eller skitne omgivelser.
Encoder Signal Conditioners
WPT optiske koderoppløsninger på opptil 5,000 pulser per omdreining (ppr) er tilgjengelig. Standardoppløsninger inkluderer 360 ppr, 512 ppr, 1024 ppr og 5,000 ppr. Ytterligere oppløsninger er tilgjengelige på forespørsel. Alle kodervalgene har fire standard koderutganger: A, B, I og A⊕B. Utganger A og B er i kvadratur, noe som betyr at de er 90 grader ute av fase. Utgang A⊕B er den eksklusive ELLER for de to kanalene, som dobler standardoppløsningen til koderen. Utgangene, 0 til 5 digitale volt-pulser, kan drive TTL-belastninger.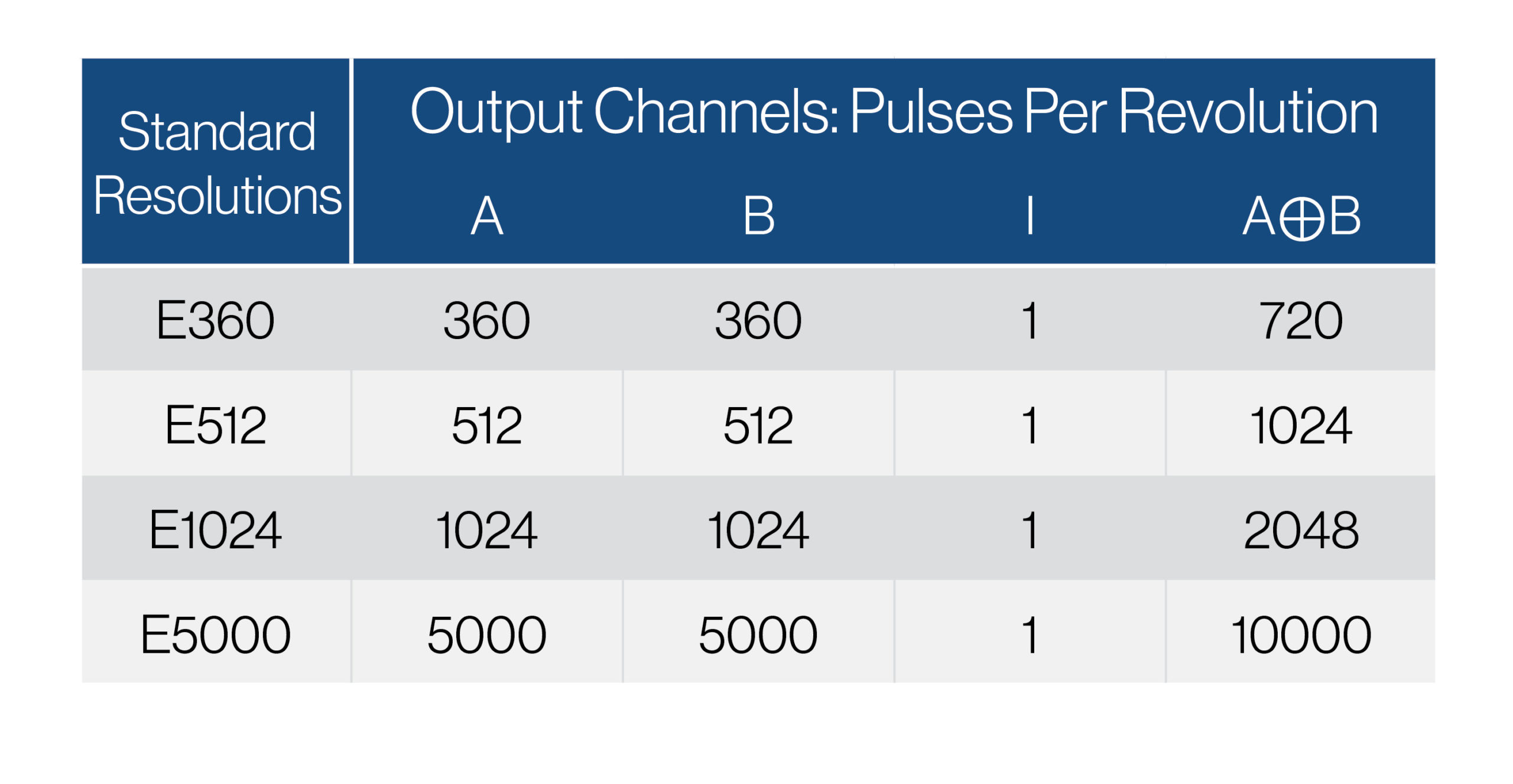
Michigan Scientific EC-LV Encoder Signal Conditioner konverterer de 0 til 5 digitale voltpulsene til WPT-sensorkoderen til lineære spenninger proporsjonale med vinkelposisjon og vinkelhastighet. EC-LV kan legges til på linje med statorkabelen og krever ingen ekstra programmering. De eksterne bryterne lar brukeren velge hastighetsområde og rotasjonsretning.
Hvis du er interessert i å lære mer om hvordan Wheel Pulse Transducer kan brukes for din applikasjon, vennligst kontakt en Michigan Scientific-representant i dag.